Ray-casting¶
Introduction¶
One of the most common tasks in game development is casting a ray (or custom shaped object) and checking what it hits. This enables complex behaviors, AI, etc. to take place. This tutorial will explain how to do this in 2D and 3D.
Godot stores all the low level game information in servers, while the scene is just a frontend. As such, ray casting is generally a lower-level task. For simple raycasts, node such as RayCast and RayCast2D will work, as they will return every frame what the result of a raycast is.
Many times, though, ray-casting needs to be a more interactive process so a way to do this by code must exist.
Space¶
In the physics world, Godot stores all the low level collision and physics information in a space. The current 2d space (for 2D Physics) can be obtained by accessing CanvasItem.get_world_2d().space. For 3D, it's Spatial.get_world().space.
The resulting space RID can be used in PhysicsServer and Physics2DServer respectively for 3D and 2D.
Accessing space¶
Godot physics runs by default in the same thread as game logic, but may be set to run on a separate thread to work more efficiently. Due to this, the only time accessing space is safe is during the Node._physics_process() callback. Accessing it from outside this function may result in an error due to space being locked.
To perform queries into physics space, the Physics2DDirectSpaceState and PhysicsDirectSpaceState must be used.
Use the following code in 2D:
func _physics_process(delta):
var space_rid = get_world_2d().space
var space_state = Physics2DServer.space_get_direct_state(space_rid)
public override void _PhysicsProcess(float delta)
{
var spaceRid = GetWorld2d().Space;
var spaceState = Physics2DServer.SpaceGetDirectState(spaceRid);
}
Or more directly:
func _physics_process(delta):
var space_state = get_world_2d().direct_space_state
public override void _PhysicsProcess(float delta)
{
var spaceState = GetWorld2d().DirectSpaceState;
}
And in 3D:
func _physics_process(delta):
var space_state = get_world().direct_space_state
public override void _PhysicsProcess(float delta)
{
var spaceState = GetWorld().DirectSpaceState;
}
Raycast query¶
For performing a 2D raycast query, the method Physics2DDirectSpaceState.intersect_ray() may be used. For example:
func _physics_process(delta):
var space_state = get_world_2d().direct_space_state
# use global coordinates, not local to node
var result = space_state.intersect_ray(Vector2(0, 0), Vector2(50, 100))
public override void _PhysicsProcess(float delta)
{
var spaceState = GetWorld2d().DirectSpaceState;
// use global coordinates, not local to node
var result = spaceState.IntersectRay(new Vector2(), new Vector2(50, 100));
}
The result is a dictionary. If the ray didn't hit anything, the dictionary will be empty. If it did hit something, it will contain collision information:
if result:
print("Hit at point: ", result.position)
if (result.Count > 0)
GD.Print("Hit at point: ", result["position"]);
The result dictionary when a collision occurs contains the following
data:
{
position: Vector2 # point in world space for collision
normal: Vector2 # normal in world space for collision
collider: Object # Object collided or null (if unassociated)
collider_id: ObjectID # Object it collided against
rid: RID # RID it collided against
shape: int # shape index of collider
metadata: Variant() # metadata of collider
}
The data is similar in 3D space, using Vector3 coordinates.
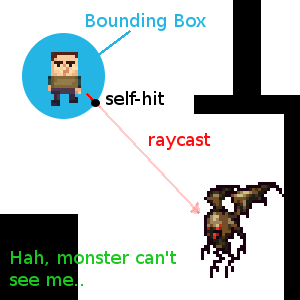
Collision exceptions¶
A common use case for ray casting is to enable a character to gather data about the world around it. One problem with this is that the same character has a collider, so the ray will only detect its parent's collider, as shown in the following image:
To avoid self-intersection, the intersect_ray() function can take an
optional third parameter which is an array of exceptions. This is an
example of how to use it from a KinematicBody2D or any other
collision object node:
extends KinematicBody2D
func _physics_process(delta):
var space_state = get_world_2d().direct_space_state
var result = space_state.intersect_ray(global_position, enemy_position, [self])
class Body : KinematicBody2D
{
public override void _PhysicsProcess(float delta)
{
var spaceState = GetWorld2d().DirectSpaceState;
var result = spaceState.IntersectRay(globalPosition, enemyPosition, new Godot.Collections.Array { this });
}
}
The exceptions array can contain objects or RIDs.
Collision Mask¶
While the exceptions method works fine for excluding the parent body, it becomes very inconvenient if you need a large and/or dynamic list of exceptions. In this case, it is much more efficient to use the collision layer/mask system.
The optional fourth argument for intersect_ray() is a collision mask. For
example, to use the same mask as the parent body, use the collision_mask
member variable:
extends KinematicBody2D
func _physics_process(delta):
var space_state = get_world().direct_space_state
var result = space_state.intersect_ray(global_position, enemy_position,
[self], collision_mask)
class Body : KinematicBody2D
{
public override void _PhysicsProcess(float delta)
{
var spaceState = GetWorld2d().DirectSpaceState;
var result = spaceState.IntersectRay(globalPosition, enemyPosition,
new Godot.Collections.Array { this }, CollisionMask);
}
}
See Code example for details on how to set the collision mask.
3D ray casting from screen¶
Casting a ray from screen to 3D physics space is useful for object picking. There is not much need to do this because CollisionObject has an "input_event" signal that will let you know when it was clicked, but in case there is any desire to do it manually, here's how.
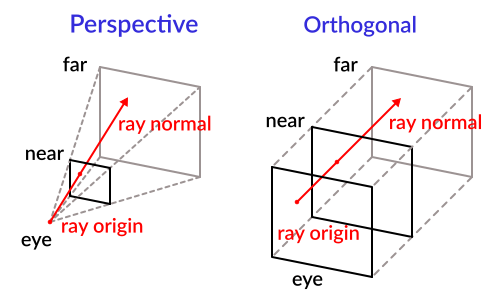
To cast a ray from the screen, you need a Camera
node. A Camera can be in two projection modes: perspective and
orthogonal. Because of this, both the ray origin and direction must be
obtained. This is because origin changes in orthogonal mode, while
normal changes in perspective mode:
To obtain it using a camera, the following code can be used:
const ray_length = 1000
func _input(event):
if event is InputEventMouseButton and event.pressed and event.button_index == 1:
var camera = $Camera
var from = camera.project_ray_origin(event.position)
var to = from + camera.project_ray_normal(event.position) * ray_length
private const float rayLength = 1000;
public override void _Input(InputEvent @event)
{
if (@event is InputEventMouseButton eventMouseButton && eventMouseButton.Pressed && eventMouseButton.ButtonIndex == 1)
{
var camera = GetNode<Camera>("Camera");
var from = camera.ProjectRayOrigin(eventMouseButton.Position);
var to = from + camera.ProjectRayNormal(eventMouseButton.Position) * rayLength;
}
}
Remember that during _input(), the space may be locked, so in practice
this query should be run in _physics_process().